我们将分享的2019年第八则是集装箱正面吊过载检测与保护控制原理及其应用。
作者:卡尔玛华东大区服务运营部 陈亮
内容摘要
集装箱正面吊运机(以下简称正面吊)在吊运 20'或者40' 的载有货物的集装箱时,载荷一般有20~45吨,由于是重负荷作业,机车行使的速度也会在5~20公里/小时之间变化。加上作业环境的不平整路面,而正面吊设计的底盘具有高强度和高扭力刚度,重心极低。因此,在负荷变动太快的情况下,载荷曲线跟不上载荷的变化,如果车速过快,或者操作伸缩臂向前移动过快,都会造成过载现象,如果设备来不及快速报警,并自动切断机械动作,就会出现车辆前倾,甚至倾翻的安全事故。
为了防止正面吊在装卸、搬运集装箱过程中由于过载发生前倾、掉落集装箱等严重事故以及对正面吊本身设备带来的损坏,正面吊普遍设计安装了一套过载检测与保护的控制系统,随着电子技术的发展,这种控制方式也从最初的机械控制,电子控制,直至发展到智能控制方式。本文以卡尔玛不同生产时期的正面吊过载检测与保护控制系统为例,介绍这些控制方式的工作原理,并通过实际的正面吊过载保护故障案例,分析说明正面吊的几种过载检测方法以及控制保护的应用。
卡尔玛DRF420-450 型号的正面吊,是目前在国内市场上占有率较高的一款正面吊,生产厂家根据正面吊在行使和作业过程中由于载荷的动态变化所带来的安全问题,设计了一套控制保护系统,该系统能够跟踪分析载荷的动态变化趋势,通过机械、电气或电子检测的手段,实现过载时的实时报警并自动保护,从而达到切断机械操作,保护正面吊和集装箱的目的。这种控制思想是通过载荷压力的感应测量,结合吊臂的长度,吊臂的角度实时位置的计算,与正常载荷范围的常规标定值不断进行比较,当系统检测到的载荷值超过了系统设定的要求时立即实施自动保护,从而避免正面吊由于操作人员的不规范操作带来过载翻车的危险,并能够最大地提高集装箱运输装载的生产效率。
正面吊过载问题
一台正面吊带着载荷(集装箱)时的稳定工作位置如图1,图中:吊臂全部收回,吊臂角度为45度。正面吊带着载荷时的重心分布如图2。
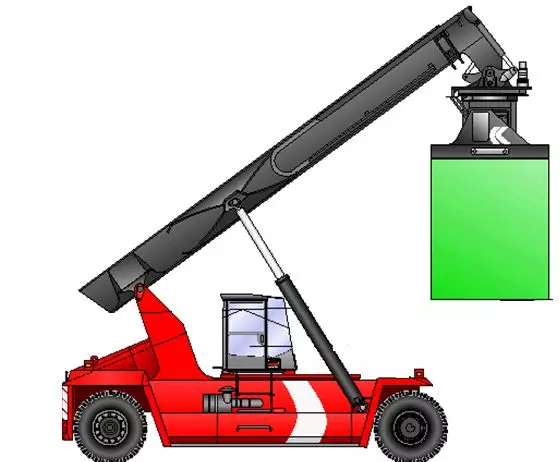
图1 正面吊载荷工作时稳定位置图
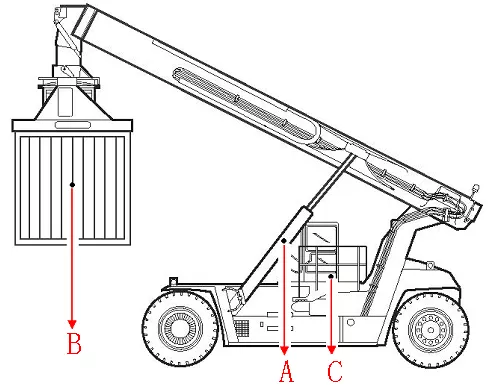
A :共同重心点 B :集装箱重心点 C :正面吊车身重心点
图2 正面吊载荷工作时重心分布图
1、正面吊重心点的变化
当正面吊在起吊集装箱后,我们知道主车有重心,吊臂、车身、吊具、集装箱等均有自己重心,但综合起来只有一个重心叫做共同重心点,而这个共同重心点的位置最终会影响正面吊的稳定。下面是正面吊有无载荷时的几种重心分布图:
(1)有载荷无过载时稳定。当正面吊吊起集装箱后,假如它的共同的重心点在‘C’处,与三角形负重面之边线等距离时,它的稳定性是最高的。
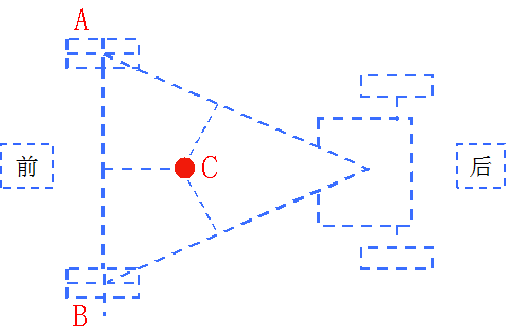
图3 正面吊稳定时的重心C
(2)无载荷无过载时——后轴过载。没有载荷的正面吊,它的重心点靠近三角尾,即后轴,不可能向前翻,但是会出现后轴过载。因为共同重心点C距离三角形负重面边线很近,也就是说机车在高速行车转弯或高速行车经一边有深坑地面,正面吊有可能向两侧翻的可能。
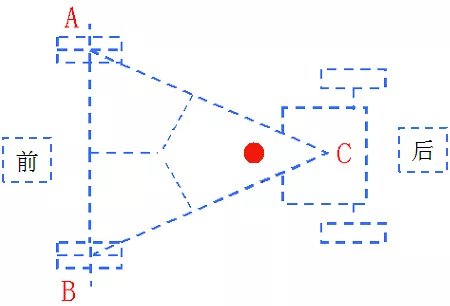
图4 正面吊无载荷时的重心C
(3)有载荷过载时——前轴过载。一辆负有集装箱的正面吊,这个时候它的共同重心点C靠近前轴,如果正面吊吊臂伸得很出,吊臂的角度又较小,它向两边翻侧的机会很小,但有可能向前翻。它的共同重心点C靠近前轴,容易前翻。
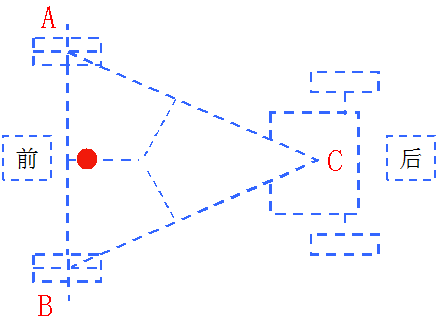
图5 正面吊有载荷过载时的重心点靠近前轴
2、正面吊的载荷曲线
正面吊吊臂长度和角度的工作范围如下图:图中:(a)当集装箱的中心距为2000mm时起升重量是45T,而吊臂长度伸出到最长时起升重量只有12T,这时如果长度变化很容易出现过载。(b)当集装箱的角度最高时(一般正面吊设计为60°)这时如果角度变化也容易出现过载。
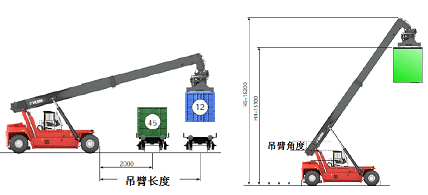
(a)吊臂长度最大 (a)吊臂角度最高
图6 正面吊吊臂最大长度和最高角度
所以,一般正面吊的技术规格都给出下图这样的载荷曲线作为参考。
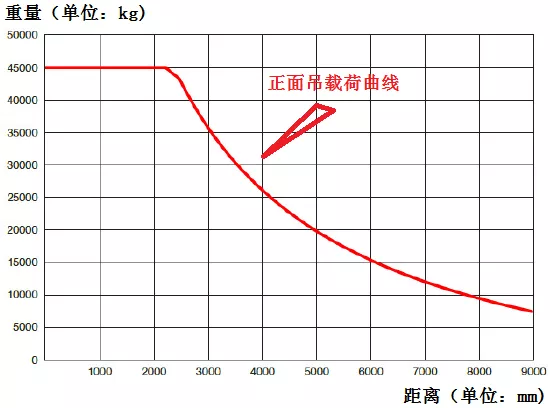
图7 正面吊载荷曲线图
3、正面吊过载时的报警与控制
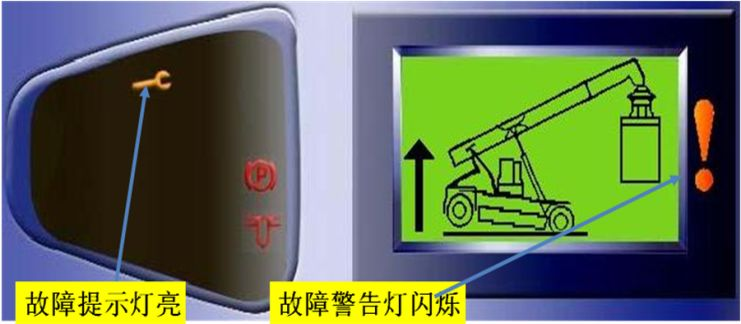
正面吊出现过载时可以通过显示下图的两种显示图标提示并向操作者示警,提醒注意。为了防止正面吊由于过载出现倾翻,在报警的同时必须立即切断机械动作,以避免操作者继续操作,例如:禁止吊臂继续伸出,禁止吊臂继续上升和下降等。为了实现这个控制,在作业过程中就要求正面吊的控制系统不断地检测正面吊吊臂的长度和角度,不断地检测载荷的重量。(集装箱的重量可以通过检测起升油缸中活塞腔的压力得到)。
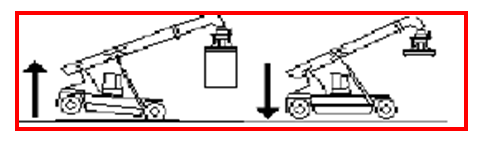
图8 正面吊显示过载图标
左代表前桥过载 右代表后桥过载
通过吊臂长度、角度和压力值的大小就可以计算出载荷的重量与力矩的关系,从而通过机车的控制系统自动切断可能存在潜在危险的机械动作。
正面吊过载的机械检测与保护
正面吊过载的机械检测方法是:在正面吊的转向桥上安装一个载荷传感器,在正面吊的吊臂长度1.5米位置安装一个长度传感器,在正面吊的吊臂角度35度位置一个角度传感器,用来判断正面吊是否过载,这些传感器采用的都是PNP型接近开关,如下图中安装的传感器。
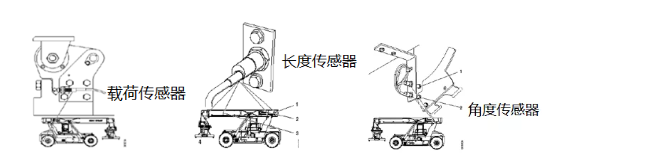
图9 正面吊的机械过载检测传感器
检测前桥过载方法是:在转向桥载荷过低时,转向桥载荷传感器向控制器发送一个电压信号(正常U=24V、过载U=0V),控制器向显示屏发送前桥过载信号,显示屏显示前桥过载图标报警。
检测后桥过载方法是:在吊臂长度小于1.5m时,吊臂长度1.5米位置传感器向控制器发送电压信号(伸长长度小于1.5m U=24V、伸长长度大于1.5m U=0V)控制器发送吊臂长度小于1.5m的信号;在吊臂角度大于35度时,吊臂角度35度位置传感器向控制器发送电压信号(吊臂角度小于35度 U=24V、吊臂角度大于35度 U=0V);控制器发送吊臂角度大于35度信号,显示屏显示后桥过载图标报警。
出现过载报警,控制器自动保护,后桥过载吊臂只能下降,前桥过载吊臂只能收回,其他操作都被禁止。这种过载保护方式比较简单,需要载荷变化幅度小,吊臂在升降和伸缩的时候不能速度过快,否则极易引起误动作。同时传感器的位置变化及损坏都会带来保护的失效,所以现在已经被过载的电子检测方式所替代。
正面吊过载的电子检测与保护
过载的电子检测与保护功能,我们通过卡尔玛DRF420-450 型号的正面吊来说明,示意图如图10所示:
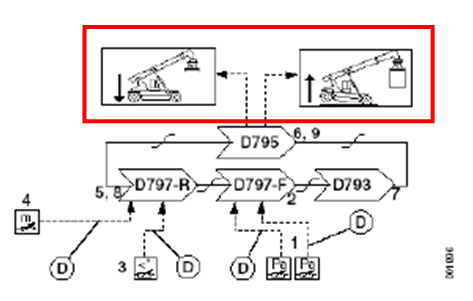
图中数字1代表左右升降油缸液压压力传感器,图中数字2代表前大梁控制器D797-F, 图中数字3代表吊臂角度传感器,图中数字4代表吊臂长度传感器,图中数字5代表后大梁控制器D797-R。图中数字6代表显示器D795。
1、与过载相关的电气部件
1. 升降油缸液压压力传感器1位于左右升降油缸底部的控制阀上,它是一个电子感应式传感器,由前大梁控制器D797-F供给电压,并向控制器发送与油缸压力成比例的电压信号。
2. 吊臂角度传感器用来检测吊臂相对于大梁的角度,由传感器壳、电位器和臂组成,安装在吊臂上,臂连接在大梁上,在吊臂角度改变时,转动电位器。此传感器由后大梁控制器D797-R供给电压,并向控制器发送与吊臂角度成比例的电压信号。
3. 吊臂长度传感器用于检测吊臂的伸长,位于吊臂后端的左侧。此传感器接在一条 弹簧加载的钢丝上,钢丝通过一个齿轮箱,连接到一个旋转电位器,钢丝与内臂相连接,吊臂伸缩时,钢丝作用与电位器,使信号改变。此传感器由后大梁控制器D797-R供给电压,并向控制器 发送与吊臂长度成比例的电压信号。
2、前桥过载工作原理:
1. 左升降油缸液压压力传感器向前大梁控制器D797-F发送与升降油缸内的压力成比例的电压信号(U=0.5V-4.5V之间),右升降油缸液压压力传感器同时也向前大梁控制器D797-F发送与升降油缸内的压力成比例的电压信号(U=0.5V-4.5V之间);电路如下图所示:
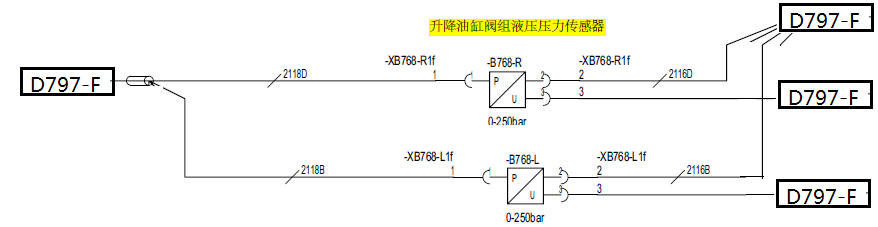
图11 升降油缸液压压力传感器电路原理图
2. 前大梁控制器D797-F通过机车的CAN总线发送压力数据;
3. 吊臂长度传感器向后大梁控制器D797-R发送与吊臂的长度成比例的电压信号(U=0.5V-4.5V之间);
4. 吊臂角度传感器向后大梁控制器D797-R发送与吊臂的角度成比例的电压信号(U=0.5V-4.5V之间);电路如下图所示:
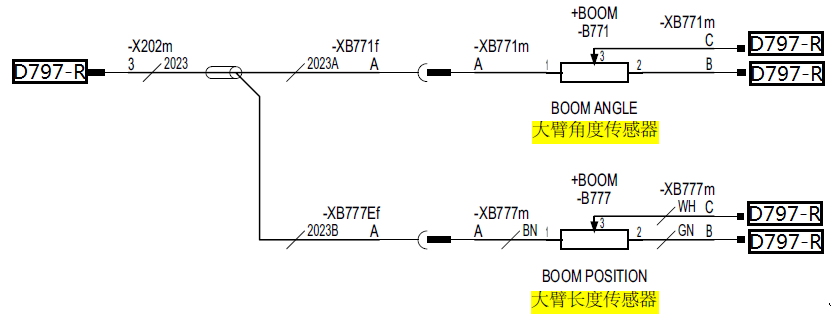
图12 吊臂长度及角度传感器电路原理图
5. 前大梁控制器D797-F计算并发送重量数据,使用吊臂角度、吊臂长度和液压油缸压力传感器值计算重量,并与每台机器独有的载荷曲线进行比较;
6. 每台正面吊的载荷曲线均不同,如果载荷过大,则前大梁控制器D797-F通过CAN总线发送前桥过载信号;
7. 在驾驶室的显示屏显示前桥过载图标并且报警,如下图所示:
正面吊过载保护故障案例
某一客户有一台正面吊,型号DRF450-60S5K,在操作过程中突然出现136#、150#报警,大臂所有功能无法操作。

图14、图15、图16故障报警
维修人员到了现场检查车辆,启动车辆,显示屏出现136#、150#报警代码,通过机车维修手册查询故障代码:
136#表示右侧起升油缸活塞压力传感器信号电压低于0.2V或者高于4.8V
150#表示过载超重,所有大臂功能限速,甚至停止。
根据故障现象判断,故障原因可能是右侧起升油缸压力传感器损坏或者是前电脑板与右侧起升油缸压力传感器线路损坏引起,从而造成电子过载报警保护见图17
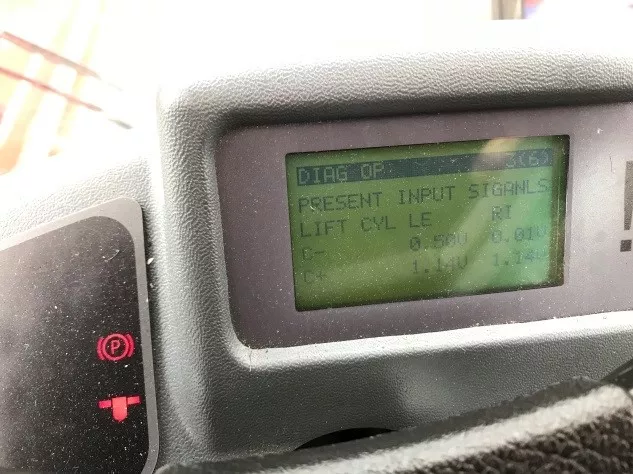
通过显示屏菜单,进入液压系统查看,发现右侧起升油缸压力传感器数值为负值,不变化,左侧压力传感器数值为正值,并随着起升油缸升降而变化。因此为了判断传感器是否损坏,将左右两侧传感器拆下互换位置测试,发现右侧起升油缸压力传感器数值为正值,并随着起升油缸升降而变化,左侧压力传感器数值为负值,不变化。根据此结果可以判断压力传感器损坏,最后新的传感器安装上去,启动车辆,故障代码消失,大臂所有功能正常。
快速维修故障案例及研讨类技术文由卡尔玛亚洲培训中心(KATC)收集整理编写。转发请注明出处。
卡尔玛亚洲培训中心(KATC)致力于成为引导亚洲集装箱装卸工业领先的培训中心,KATC提供一个专业的平台供广大的合作伙伴和用户在全球无界的知识环境中投入学习、忘掉弊习、重新学习。
了解更多KATC详情:
Emma Xu
电话:021 5866 6658-152
邮箱:Sa.Xu@kalmarglobal.com
{kind=link}